Каких результатов можно достичь, используя GNSS-систему Compass?
Рисунок 1. Размещение сети слежения GPS+Compass, построенной Исследовательским центром GNSS при университете Ухань и используемой в качестве тестовой сети в данном исследовании.
Китайская спутниковая навигационная система Compass, также известная как BeiDou, разрабатывалась более десяти лет. По данным Китайского национального космического управления, развитие системы осуществляется в три этапа: экспериментальная система, региональная система и глобальная система.
Экспериментальная система была построена под названием BeiDou-1, состояла из трех спутников на геостационарной орбите (GEO) и обеспечивала операционное позиционирование и обмен короткими сообщениями. Последующая система BeiDou-2 должна изначально выступить в качестве региональной системы, состоящей из пяти GEO-спутников, пяти спутников на геосинхронной орбите (IGSO) и четырех спутников, расположенных на среднеземной орбите (MEO), а впоследствии будет расширена до уровня глобальной системы, состоящей из пяти GEO-спутников, трех IGSO-спутников и двадцати семи MEO-спутников. Эксплуатация региональной системы в Китае и на близлежащих территориях должна начаться в конце 2012 года, а запуск глобальной системы намечен в конце 2020 года.
Система Compass обеспечит двухуровневый сервис. Открытый сервис будет доступен гражданским лицам бесплатно, при этом точность позиционирования составит 10 метров, точность синхронизации – 20 наносекунд (нс), а точность скорости – 0,2 м/с. Закрытый (авторизованный) сервис даст более точное и надежное использование даже в самых сложных ситуациях, а также, вероятно, будет поддерживать обмен короткими сообщениями.
Готовность региональной системы уже совсем близко, группа спутников почти готова к работе. Помимо стандартных служб и определения местоположения особый интерес представляет детальное исследование сервиса точного позиционирования в режиме реального времени региональной системы Compass.
При помощи данных, собранных в мае 2012 года в региональной сети слежения, размещенной университетом Ухань, мы сможем исследовать работу системы точного расчета орбиты спутника и синхроимпульсов, являющихся основой всех сервисов точного позиционирования, используя только данные системы Compass. Более того, мы сможем продемонстрировать возможности сервисов точного позиционирования системы Compass с помощью метода Precise Point Positioning (PPP) в режимах постобработки и симуляции (виртуализации) реального времени.
После короткого описания набора данных мы представим программный пакет EPOS-RT, используемый для обработки всех данных. Затем мы опишем стратегии обработки для различных областей исследования, а в конце представим результаты и детально их обсудим.
Данные слежения
Исследовательский центр GNSS при университете Ухань разворачивает собственную глобальную GNSS-сеть для научных целей, уделяя особое внимание изучению системы Compass, тем более что по системам GPS и GLONASS в настоящий момент уже имеется большое количество информации. Таким образом, в Китае и на близлежащих территориях размещено более 15 станций слежения.
С разрешения руководства системы Compass данные слежения за две недели (со 122-го по 135-й день 2012 года) оказались доступными для изучения Исследовательским центром GNSS при университете Ухань. Станции слежения оборудованы двухчастотными приемниками UR240 и антеннами UA240, разработанными китайской компанией UNICORE и способными принимать сигналы систем GPS и Compass. Для процесса изучения потребовалось использование 12 таких станций. Семь из них размещены в Китае: в Чэнду (CHDU), Харбине (HRBN), Гонконге (HKTU), Лхасе (LASA), Шанхае (SHA1), Ухане (CENT) и Сиане (XIAN); остальные пять - в Сингапуре (SIGP), Австралии (PETH), ОАЭ (DHAB), Европе (LEID) и Африке (JOHA). На Рисунке 1 показано размещение станций, а Таблица 1 показывает доступность данных каждой станции во время выбранного периода испытаний.
Таблица 1. Доступность данных станций в тестовой сети
В работе находилось 11 спутников: 4 GEO-спутника (C01, C03, C04, C05), 5 IGSO-спутников (C06, C07, C08, C09, C10) и 2 MEO-спутника (C11, C12). Во время испытаний были обнаружены два маневра – на спутнике С01 на 123-й день и на спутнике С06 на 130-й день. Два MEO-спутника не включены в процесс обработки, так как все еще находятся на тестовой стадии.
Программные пакеты
Программное обеспечение EPOS-RT разрабатывалось как для постобработки, так и для обработки наблюдений в режиме реального времени и для нескольких других наблюдаемых систем – GNSS, лазерная телеметрия со спутника (SLR) и, вероятно, интерферометрия со сверхдлинной базой, которые могут быть использованы в различных наземных и космических приложениях. Продукт разрабатывался в Немецком исследовательском центре геологических наук (GFZ) для использования в режиме реального времени и работал на протяжении нескольких лет с PPP-сервисами и сервисами дифференциальных поправок. В последнее время был добавлен функционал для постобработки, призванный поддерживать точное определение орбиты спутников систем GNSS и LEO в течение нескольких текущих проектов.
Для исследования мы адаптировали программное обеспечение под работу с данными системы Compass. В связи с тем, что сигналы Compass схожи с сигналами GPS и Galileo, процесс адаптации оказался довольно прост, в том числе и благодаря новой структуре программного пакета. Единственное отличие от GPS и Galileo – это преобладание GEO- и IGSO-спутников в системе Compass. По этой причине большинство спутников может отслеживаться только в региональной сети; так, геометрия наблюдений за точным определением орбиты спутников и за позиционированием сильно отличается от геометрии систем GPS и GLONASS.
На Рисунке 2 показана структура программного пакета. Она включает в себя следующие базовые модули: предобработка, орбитальная интеграция, оценка параметров и редактирование данных, а также устранение погрешностей. Мы разработали оценку по методу наименьших квадратов постобработки данных и оценку информационного фильтра по принципу квадратного корня.
Рисунок 2. Структура программного обеспечения EPOS-RT
Обработка GPS-данных
Для оценки продуктов, полученных на основе системы Compass, нам нужны их так называемые истинные значения. Наиболее простой способ – оценить значения, используя данные GPS, полученные теми же самыми приемниками.
В течение всего тестового периода на ежедневной основе используется метод PPP для обработки GPS-данных с применением конечных продуктов Международной Службы GNSS (IGS), а в качестве параметров выступают тактовый генератор приемника, координаты станции и зенитная тропосферная задержка (ZTD). Повторяемость ежедневных результатов подтверждает точность позиционирования менее 1 см, что весьма неплохо для обработки данных в системе Compass. Поправки тактового генератора приемника и ZTD получены в виде сопутствующего результата.
Далее ежедневные результаты объединяются для получения конечных координат станции. Эти координаты будут зафиксированы как базовые значения данных в системе точного определения орбиты спутников и синхроимпульсов Compass. У систем Compass и GPS фазовые центры антенны обычно не совпадают, антенна не откалибрована, соответственно, соответствующие поправки недоступны. Как бы то ни было, в данном исследовании погрешность может быть проигнорирована, так как для всех станций используются антенны одного типа.
Система определения орбиты спутников и синхроимпульсов
В системе Compass для точного определения орбиты спутников и синхронизации используется трехдневный результат, позволяющий повысить низкую точность, вызванную слабой геометрией региональной сети слежения. Орбиты и синхроимпульсы подвергаются оценке независимо от наблюдений за системой GPS и полученных в их ходе результатов, за исключением координат станции, которые используются в качестве известных значений.
Расчетные продукты утверждаются в ходе проверки орбитальных погрешностей наложенных временных интервалов между двумя смежными трехдневными результатами. Как показано на Рисунке 3, орбита последнего дня в трехдневном результате сравнивается с орбитой среднего дня в следующем трехдневном результате. Разница между среднеквадратичными отклонениями орбиты используется в качестве показателя при получении расчетной орбиты.
Рисунок 3. Трехдневный результат и наложение орбит. Последний день трехдневного результата сравнивается со средним днем следующего трехдневного результата
Модели и параметры наблюдения, используемые в процессе обработки в каждом трехдневном результате, перечислены в Таблице 2. Все данные идентичны операционным данным обработки IGS, полученным в Немецком исследовательском центре геологических наук, за исключением сдвига фазового центра антенны (PCO) и колебаний фазового центра (PCV), обозначенных нулем для обоих приемников по причине недоступности.
Силовые модели спутников также идентичны тем, что используются в системах GPS и GLONASS в стандартных данных обработки IGS и перечислены в Таблице 2. Кроме того, отсутствует информация о системах управления положением в пространстве на спутниках Compass. Мы можем лишь предположить, что номинальное положение определено как GPS-спутник Block IIR.
Таблица 2. Наблюдение, силовые модели и параметры, используемые в обработке данных
Спутниковые орбиты. Рисунок 4 показывает статистику сравнения наложенных орбит для каждого отдельного спутника. На рисунок нанесены усредненные среднеквадратические значения (RMS) в направлении движения (линейно), перпендикулярно движению, в радиальном направлении и значение 3D-RMS. В левой части показаны GEO-спутники, в правой – IGSO-спутники; усредненные значения двух групп обозначены как (GEO) и (IGSO) соответственно. Значения RMS также представлены в Таблице 3.
Как и предполагалось, у GEO-спутников RMS значительно больше, чем у IGSO-спутников. В среднем, GEO-спутники обладают точностью 3D-RMS, равной 288 см, у IGSO-спутников это значение составляет 21 см.
Как обычно, линейный компонент расчетной орбиты имеет более низкое качество по сравнению с остальными в определении точной орбиты; это становится очевидным, если посмотреть на Рисунок 4 и Таблицу 3. Как бы то ни было, на большое значение 3D-RMS GEO-спутников влияет линейный компонент. Таким образом, это значение оказывается в десятки раз больше, чем у других спутников. Если, к примеру, рассматривать IGSO-спутники, то тут наблюдается малое уменьшение линейного компонента по сравнению с перпендикулярным и радиальным. Основная причина – у спутников IGSO более сильная по сравнению с GEO-спутниками геометрия, вызванная важными маневрами, относящимися к региональной наземной сети слежения.
Рисунок 4. Усредненное дневное значение RMS всех 12-ти трехдневных результатов
Таблица 3. Значение RMS наложенных орбит (единицы, см)
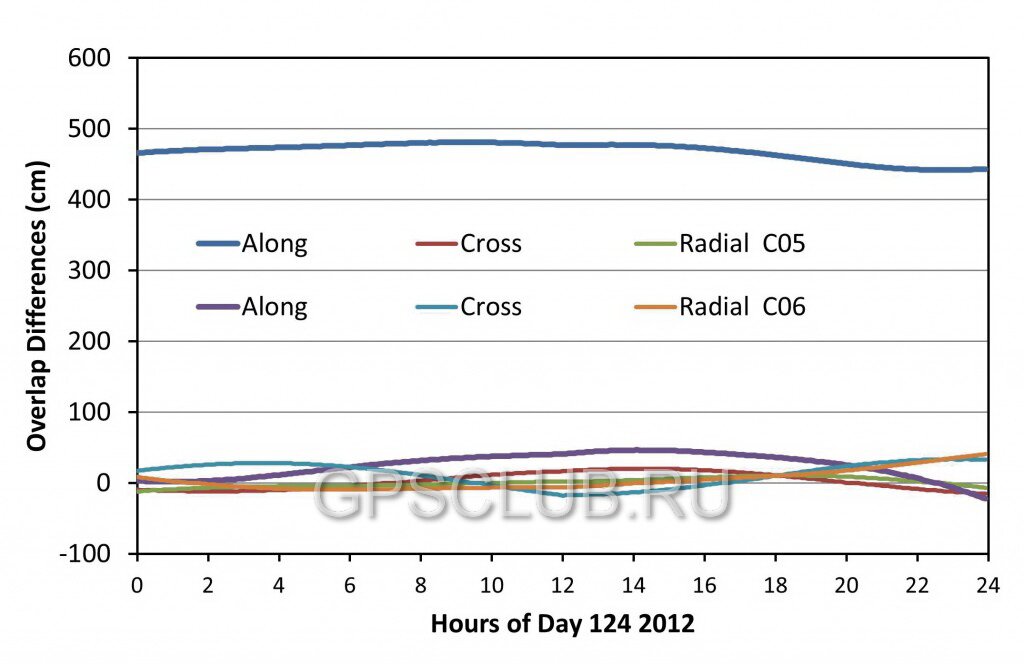
Если мы посмотрим на временной ряд орбитальных погрешностей, то сможем заметить, что большое значение RMS в продольном направлении на самом деле вызвано постоянным расхождением двух наложенных орбит. На Рисунке 5 показан временной ряд орбитальных погрешностей спутников C05 и C06, как примеров спутников GEO и IGSO соответственно. Для обоих спутников разница в продольном движении практически постоянна и достигает -5 метров для спутника C05.
Необходимо отметить, что GEO-спутники показывают схожие с IGSO-спутниками результаты наложения в перпендикулярном и радиальном направлениях.
Рисунок 5. Временной ряд орбитальных погрешностей спутников C05 и C06 на 124-й день 2012 года
Спутниковые синхроимпульсы. На Рисунке 6 сравниваются спутниковые синхроимпульсы, полученные из двух смежных трехдневных результатов, так же как и в случае со спутниковыми орбитами. Спутник C10 выбран в качестве исходного для предотвращения систематических отклонений, связанных с началом отсчета времени. Усредненное значение RMS составляет 0,56 нс (17 см), а усредненное среднеквадратическое отклонение (STD) – 0,23 нс (7 см). Спутник C01 имеет значительно большее отклонение по сравнению с остальными спутниками, что может быть связано с его орбитами.
Из сравнения орбит и синхроимпульсов следует, что и орбита, и синхроимпульсы едва выполняют требования метода PPP для получения сантиметровой точности. Как бы то ни было, отклонения орбит и синхроимпульсов уравновешивают друг друга в наблюдаемых моделях. Более того, постоянные продольные отклонения производят почти постоянное отклонение в наблюдаемых моделях из-за немного измененной геометрии GEO-спутников. Это постоянное отклонение не оказывает влияние на фазовые наблюдения из-за определения параметров погрешностей. Поэтому вместо сравнения орбит и синхроимпульсов по отдельности, необходимо в обычном режиме исследовать ожидаемый максимальный среднеквадратический вклад эфемеридных данных и ошибок времени в погрешность оборудования. В этом исследовании качество расчетных орбит и синхроимпульсов оценивается при помощи повторяемости координат станции, полученных с помощью метода PPP с использованием этих продуктов.
Рисунок 6. Статистика погрешностей наложения расчетного приемника и спутниковых синхроимпульсов. Спутник C10 выбран в качестве исходного синхроимпульса.
Метод Precise Point Positioning (PPP)
Вместе с оценками спутниковых орбит и синхроимпульсов метод PPP в статическом и кинематическом режимах также применим к пользовательской станции, которая не используется при определении орбит и синхроимпульсов. Это необходимо для демонстрации точности PPP-службы системы Compass.
При обработке PPP-данных спутниковые орбиты и синхроимпульсы зафиксированы на выше указанных значениях. Синхроимпульсы приемника рассчитываются с учетом начала отсчета времени, а тропосферная задержка остается после того как поправки основной модели параметризуются с использованием случайного блуждания процесса. Координаты станции определяются в соответствии с режимом позиционирования: как определенные параметры для статического режима или как независимые параметры с учетом начала отсчета времени для кинематического режима.
Данные станции CHDU в Чэнду, не используемой в определении орбит и синхроимпульсов, со 123-го по 135-й день используются как пользовательская станция в PPP-обработке. Расчетные координаты станции и ZTD сравниваются с аналогичными расчетными параметрами данных системы GPS.
Статический режим PPP. В статическом тесте PPP проводился в несколько сессий продолжительностью 2 часа, 6 часов, 12 часов и 24 часа. Рисунок 7 и Таблица 4 показывают статистику погрешностей положений статических результатов в разных сессиях, которые проводились со 123-го по 125-й день.
Точность положений по методу PPP при 2-часовой сессии составляет 5 см, 3 см и 10 см на восток, север и по вертикали, что сравнимо с дневными результатами системы GPS. Точность повышается при увеличении продолжительности сессии. Если обрабатывать данные за 6 часов или дольше, то точность позиционирования составляет около 1 см на восток и запад и 4 см по вертикали. В Таблице 4 мы видим, что при наблюдениях продолжительностью 12 и 24 часа точность повышается всего на несколько миллиметров по горизонтали и на 2 см по вертикали. Большее значение RMS по вертикали может быть вызвано разными значениями PCO и PCV антенны приемника для систем GPS и Compass, которые в настоящий момент недоступны.
Рисунок 7. Погрешность положений в статическом режиме PPP в сессиях продолжительностью 2 часа, 6 часов, 12 часов и 24 часа в сравнении с расчетными данными системы GPS для станции CHDU
Таблица 4. Значение RMS PPP-позиций при различной продолжительности сессий
Кинематический режим PPP. Кинематический режим PPP применяется к станции CHDU с использованием тех же орбитальных и синхроимпульсных продуктов, что и в статическом позиционировании со 123-го по 125-й день 2012 года.
Результат 125-го дня представлен здесь в качестве примера. Положения рассчитывались с использованием метода наименьших квадратов с очень слабым ограничением к положениям в 1 метр при двух смежных точках начала отсчета времени. Полученные результаты показаны на Рисунке 8. Различные значения связаны с дневным статическим результатом системы Compass. Смещение и STD различных значений на восток, север и по вертикали перечислены в Таблице 5. Смещение составляет 16 мм, 13 мм и 1 мм, а STD – 10 мм, 14 мм и 55 мм на север, восток и по вертикали соответственно.
Рисунок 8. Погрешность положений в кинематическом режиме PPP и дневных статических результатов, а также число наблюдаемых спутников
Таблица 5. Статистика погрешностей положений в кинематическом режиме PPP в постобработке и дневной результат (м)
Значение ZTD, полученное в системе Compass. ZTD является весьма важным продуктом, который можно получить в ходе GNSS-наблюдений помимо точных орбит, синхроимпульсов и положений. ZTD играет особенно важную роль в метеорологических исследованиях и в прогнозировании погоды.
ZTD на станции CHDU рассчитывается как стохастический процесс с удельной мощностью 5 мм ?час посредством фиксации спутниковых орбит, синхроимпульсов и координат станции на их точных значениях, как это обычно происходит с данными системы GPS.
Та же самая процедура обработки применяется к GPS-данным, полученных на станции, но с конечными результатами орбит и синхроимпульсов международной службы GNSS (IGS). Временные ряды ZTD получены в системах GPS и Compass независимо друг от друга во время наблюдений, проводившихся со 123-го по 125-й день 2012 года, а разница их значений показана на Рисунке 9.
Рисунок 9. Сравнение значений ZTD, полученных независимо друг от друга в системах GPS и Compass. Смещение дух временных рядов составляет около -14 мм (GPS – Compass), а STD – около 5 мм.
Очевидно, причина различий кроется в системе Compass, ведь значения ZTD, полученные в системе GPS, обладают более высоким качеством по причине наблюдений с использованием различных методов. Как бы то ни было, это различие можно уменьшить, применив поправки PCO и PCV антенны приемника, и, естественно, что с введением в режим работоспособности большего числа спутников это различие также станет менее заметным.
Виртуальная PPP-служба в режиме реального времени
Глобальная PPP-служба в режиме реального времени должна стать высокоточной системой позиционирования. Поэтому мы попробовали выяснить возможности PPP-службы реального времени в системе Compass, используя виртуальную служебную систему реального времени и проведя тесты полученного набора данных.
Мы использовали данные трехдневных результатов в качестве основы для того, чтобы предсказать орбиты, следующие 12 часов. Предполагаемые орбиты сравнили с расчетными орбитами, полученными на основе трехдневных результатов. Статистика разницы значений предполагаемых орбит в первые 12 часов в 125-й день 2012 года показана на Рисунке 10.
Из Рисунка 10 видно, что GEO-спутники и IGSO-спутники имеют схожие значения STD – в среднем около 30 см. Таким образом, слишком большое значение RMS, до 6 метров для спутников C04 и C05, предполагает большую постоянную разницу в этом направлении. Большой постоянный сдвиг в продольном направлении представляет собой серьезную проблему при определении точной орбиты в нынешней системе Compass. К счастью, постоянное отклонение не оказывает особое влияние на качество позиционирования благодаря тому, что в региональной системе эффекты таких отклонений довольно схожи.
Рисунок 10. Значения RMS (слева) и STD (справа) разностей предполагаемых и расчетных орбит
На Рисунке 11 представлены различные значения позиций виртуальной PPP-службы реального времени и базовые значения статических дневных результатов. Сравнивая PPP-результат в режиме реального времени, представленный на Рисунке 11, и результат постобработки на Рисунке 8, мы видим, что для того, чтобы РРР-результаты в режиме реального времени достигли точности 10 см, требуется около получаса на процесс конвергенции. После этого точность сохраняется на уровне ±20 см и с течением времени становится лучше. Показатели производительности схожи с аналогичными показателями системы GPS, так как наблюдалось, по меньшей мере, шесть спутников, хотя в процессе определения положения задействованы семь спутников. Предполагаемая орбита спутника C01 недоступна в связи с маневром, совершенным днем ранее. Если сравнивать группу спутников в исследовании и планируемую группу, задействованную в региональной системе, то необходимо отметить, что в полностью работоспособной региональной системе появятся один GEO-спутник и четыре MEO-спутника. Из этого следует, что при полной группе спутников достичь точности 10 см или даже 1 см, в службе точного позиционирования используя только систему Compass возможно.
Рисунок 11. Погрешности положений виртуальной PPP-службы в режиме реального времени и статической дневной PPP-службы. Также указано число наблюдаемых спутников
Заключение
Трехдневный расчет точных орбит и синхроимпульсов показывает точность орбиты менее 288 см для GEO-спутников и 21 см для IGSO-спутников, а точность спутниковых синхроимпульсов составляет 0,23 нс (STD) и 0,56 нс (RMS). Наибольшая орбитальная разность заметна в продольном направлении и представляет собой постоянное значение, в то время как разность в других направлениях малозаметна.
Статический режим PPP дает точность около 5 см, 3 см и 10 см на восток, север и по вертикали при наблюдении в течение двух часов. При 6-часовой или более продолжительной сессии точность достигает 1 см по горизонтали и менее 4 см по вертикали. Кинематический режим PPP обеспечивает точность позиционирования 2 см, 2 см и 5 см на восток, север и по вертикали соответственно. Высокое качество результатов PPP предполагает, что смещения орбит, особенно большое постоянное смещение в продольном направлении, могут быть компенсированы за счет расчетных спутниковых синхроимпульсов и/или поглощены параметрами погрешности благодаря тому, что геометрия GEO-спутников практически не меняется.
Виртуальная PPP-служба в режиме реального времени также подтверждает то, что службы позиционирования в режиме реального времени могут достигать точности 10 см и даже 1 см с использованием одной лишь системы Compass при наличии в зоне видимости всего девяти спутников. По готовности региональной системы точность получаемых данных возрастет.
Это предварительные результаты, полученные за короткий промежуток времени. Стоит подождать результатов, полученных специалистами других изданий, для проведения сравнения. Дальнейшее изучение позволит подтвердить новые стратегии по повышению точности, надежности и доступности. Также ведутся работы над комплексной обработкой данных системы Compass и других GNSS-систем, в ходе которых появится больше информации об их точности для проведения дальнейших исследований.
ОБСУДИТЬ НА ФОРУМЕ
http://www.gpsworld.com/what-is-achievable-with-the-current-compass-constellation/
Права на перевод ©GPSClub.ru
Перепечатка допускается при активной ссылке на источник перевода